本文所述的區(qū)域運動并非動網(wǎng)格中的運動域,而是指在多參考系(MRF)或滑移網(wǎng)格中所涉及到的區(qū)域的運動��。
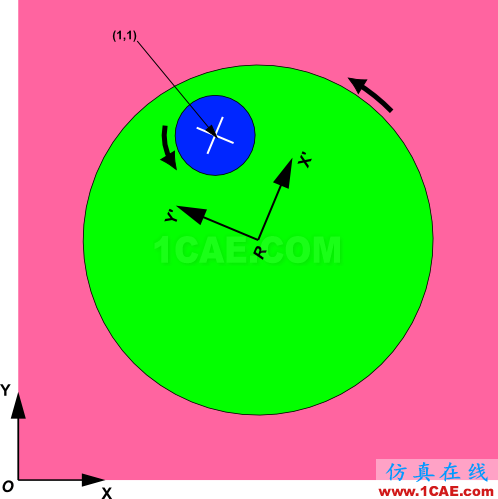
在滑移網(wǎng)格中指定區(qū)域運動時,除了能夠指定絕對運動外,還能指定某一區(qū)域與其他區(qū)域間的相對運動,如圖所示���。
區(qū)域運動的指定,除了可以采用Profile文件外,還可以利用UDF宏DEFINE_TRANSIENT_PROFILE及DEFINE_ZONE_MOTION。這兩個宏均可采用解釋及編譯形式加載�。
此宏主要用于替代Profile文件,指定網(wǎng)格區(qū)域隨時間變化規(guī)律。
該UDF宏的形式為:
DEFINE_TRANSIENT_PROFILE(name,current_time)
其中:
name:自定義的宏的名稱
current_time:當(dāng)前時間
在宏文件中,用戶需要顯式返回值�����。
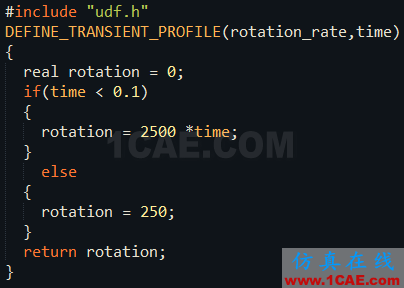
簡單的示例:
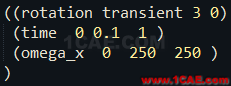
若將宏中的rotation指定給某一角速度分量,如omega_x,則該宏等同于PROFILE文件:
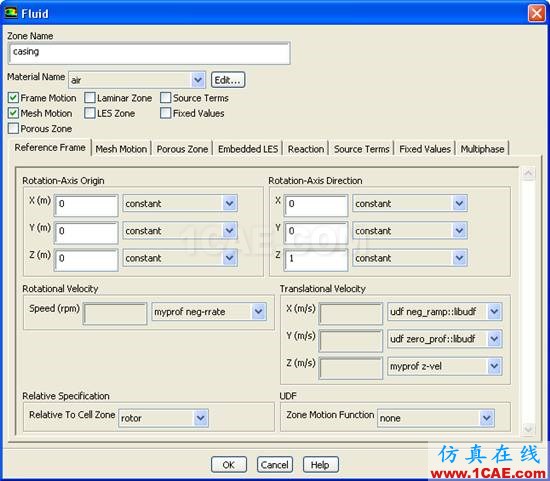
需要注意的是,一個UDF宏只能指定一個速度分量�����。若需要指定多個速度分量的話,則需要寫多個宏�����。宏的加載如下圖所示�。此宏即可表示旋轉(zhuǎn),也可以用于平移。
Fluent中還可以利用DEFINE_ZONE_MOTION宏定義區(qū)域的運動����。該宏的形式:
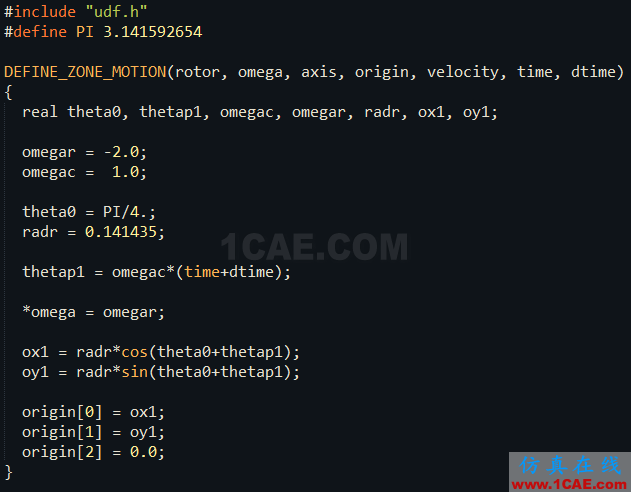
DEFINE_ZONE_MOTION(name,omega,axis,origin,velocity,time,dtime)
其中參數(shù):
name:symbol name��。UDF名稱,用戶自己定義���。
omega:real *omega。旋轉(zhuǎn)角速度指針,默認值為0��。
axis:real axis[3]�����。旋轉(zhuǎn)軸向量數(shù)組�。在2D平面模型中,默認值為(0 0 0);對于2D軸對稱模型,默認值為(1 0 0)
origin:real origin[3]。旋轉(zhuǎn)軸原點��。默認值(0 0 0)
velocity:real velocity[3]��。平移速度向量,默認值為(0 0 0)
time:real time����。當(dāng)前時間
dtime:real dtime。當(dāng)前時間步長
在利用此UDF時,只有name是用戶指定的,其他的參數(shù)均為Fluent傳入然后在宏中進行修改��。�。
對于前面同時存在自轉(zhuǎn)和公轉(zhuǎn)的案例,可以利用UDF宏DEFINE_ZONE_MOTION:
網(wǎng)格運動效果如視頻所示。



報名")

